
About Me
I am a final-year Ph.D. student at UC Berkeley in the Mechanical Systems Control Lab, affiliated with BAIR and Berkeley DeepDrive, and advised by Prof. Masayoshi Tomizuka and Dr. Wei Zhan. I am supported by the NSF Graduate Research Fellowship Program and the Taiwan–UC Berkeley Fellowship.
My research focuses on developing safe and intelligent autonomous systems for complex, human-centered environments. Central to this work are machine learning, generative models, and reinforcement learning with applications in autonomous driving and robotics. A key aspect is to tackle challenges involving multi-agent, interactive human behavior and complex long-tail scenes at scale.
Currently, I’m a research intern at Applied Intuition, where I work on language models for long-horizon reasoning in planning and large-scale, human-like self-play reinforcement learning. Previously, I was a research intern at NEC Labs with Manmohan Chandraker, focusing on language-based, safety-critical simulation for autonomous driving.
I graduated from National Taiwan University. I worked in Bio-Inspired Robotics Lab as an undergrad researcher, advised by Prof. Pei-Chun Lin, we developed a Spherical Robotics System that with hybrid rolling and leaping capability.
Publications
For the most up-to-date list of publications, please see google scholar.
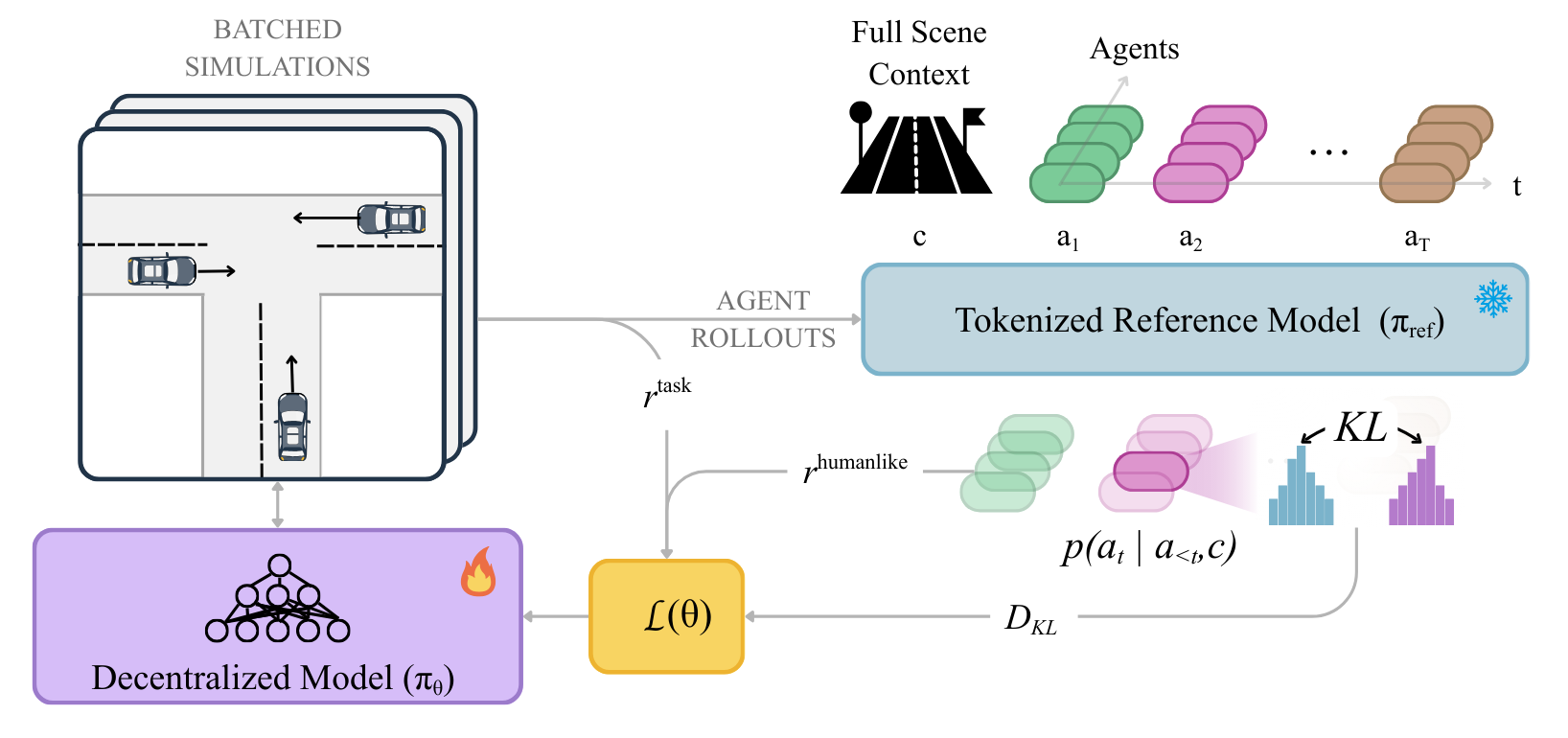 | Self-Play Anchoring with Centralized Reference Models Preprint, 2025 |
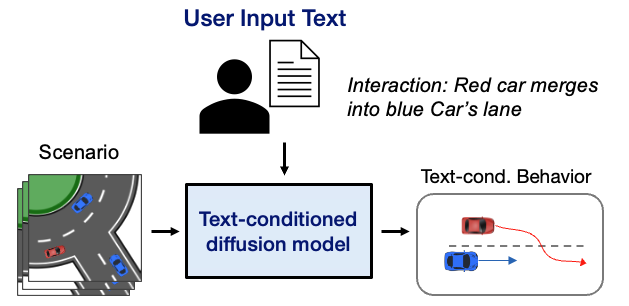 | LANGTRAJ: Diffusion Model and Dataset for Language-Conditioned Trajectory Simulation International Conference on Computer Vision (ICCV), 2025 |
 | SAFE-SIM: Safety-Critical Closed-Loop Traffic Simulation with Diffusion-Controllable Adversaries European Conference on Computer Vision (ECCV), 2024 |
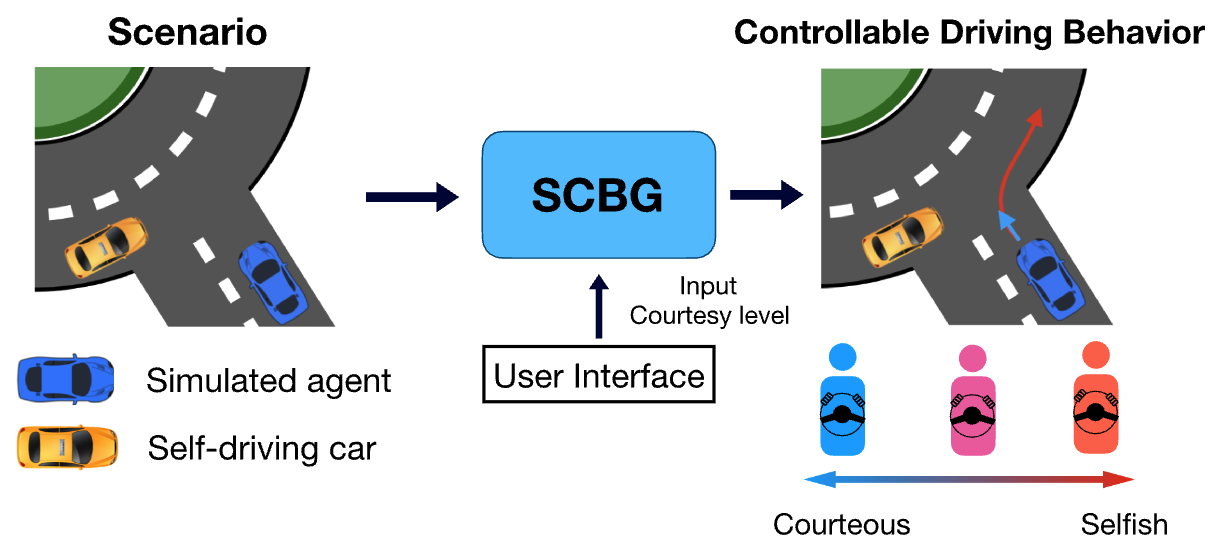 | Editing Driver Character: Socially-Controllable Behavior Generation for Interactive Traffic Simulation IEEE Robotics and Automation Letters (RA-L), 2023 |